My Robot Report
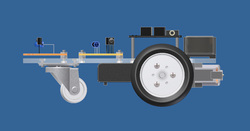
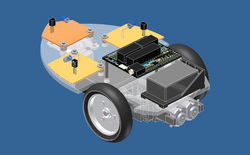
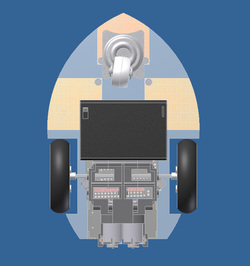
The polycarbonate chassis of my robot was mad using a CNC router. The aerodynamic design was drafted up using autoCAD and then programmed into the CNC routing machine. Many of the features of the robot were drafted using Autodesk Inventor 2010, such as the gearbox, motors, castor, nuts and bolts, components, circuit boards and PICAXE project board.
It was crucial that all circuitry had to withstand bumps and sharp jolts which is why I decided to choose soldered circuit boards over temporary bread boards. Also my programming had to be precise and easy to follow.
I decided to make a plastic shell for my robot to give it a nice sleek look and to hold in all the wiring and components. I also used 4 waterclear fluorescent coloured LEDs to add some awesomeness to my design.
I covered all wire-pin junctions with heat shrink in order to stop any short circuits occurring, this ended in an overall smooth running robot with MINIMAL hardware problems, as we're all aware of Murphy's law.
Below are some images of the computer aided drafts I created, an example of the PICAXE programme I used to navigate my robot through the maze and a simple circuit diagram of the PICAXE Microcontroller.
It was crucial that all circuitry had to withstand bumps and sharp jolts which is why I decided to choose soldered circuit boards over temporary bread boards. Also my programming had to be precise and easy to follow.
I decided to make a plastic shell for my robot to give it a nice sleek look and to hold in all the wiring and components. I also used 4 waterclear fluorescent coloured LEDs to add some awesomeness to my design.
I covered all wire-pin junctions with heat shrink in order to stop any short circuits occurring, this ended in an overall smooth running robot with MINIMAL hardware problems, as we're all aware of Murphy's law.
Below are some images of the computer aided drafts I created, an example of the PICAXE programme I used to navigate my robot through the maze and a simple circuit diagram of the PICAXE Microcontroller.
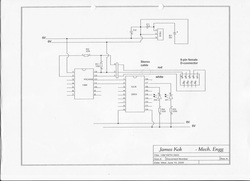
PICAXE circuit diagram
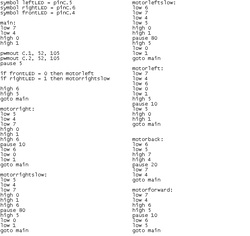
Here's an example of the PICAXE programme I used.
Here are some images of the CAD model I created using Autodesk Inventor 2010
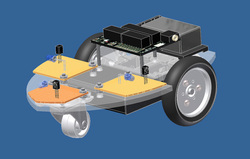
As you can see the drafting had to be quite detailed in order to achieve an overall good model.